Научить протез подстраиваться к поверхности местности
Роботизированные протезы нижних конечностей, которые помогают человеку почти естественно ходить, плохо работают на различных поверхностях. Ходьба по бетону с твердым покрытием сильно отличается от прогулки по травянистым полям, но без знания рельефа местности под ними протез невозможно соответствующим образом отрегулировать. В настоящее время американские ученые университета Северной Каролины разработали систему искусственного интеллекта на основе камер, которая может распознавать различные участки местности и сигнализировать протезу об необходимости изменения его движения в соответствии с поверхностью, находящейся под ним.
Информация о разработке опубликована в журнале IEEE Transactions on Automation Science and Engineering.
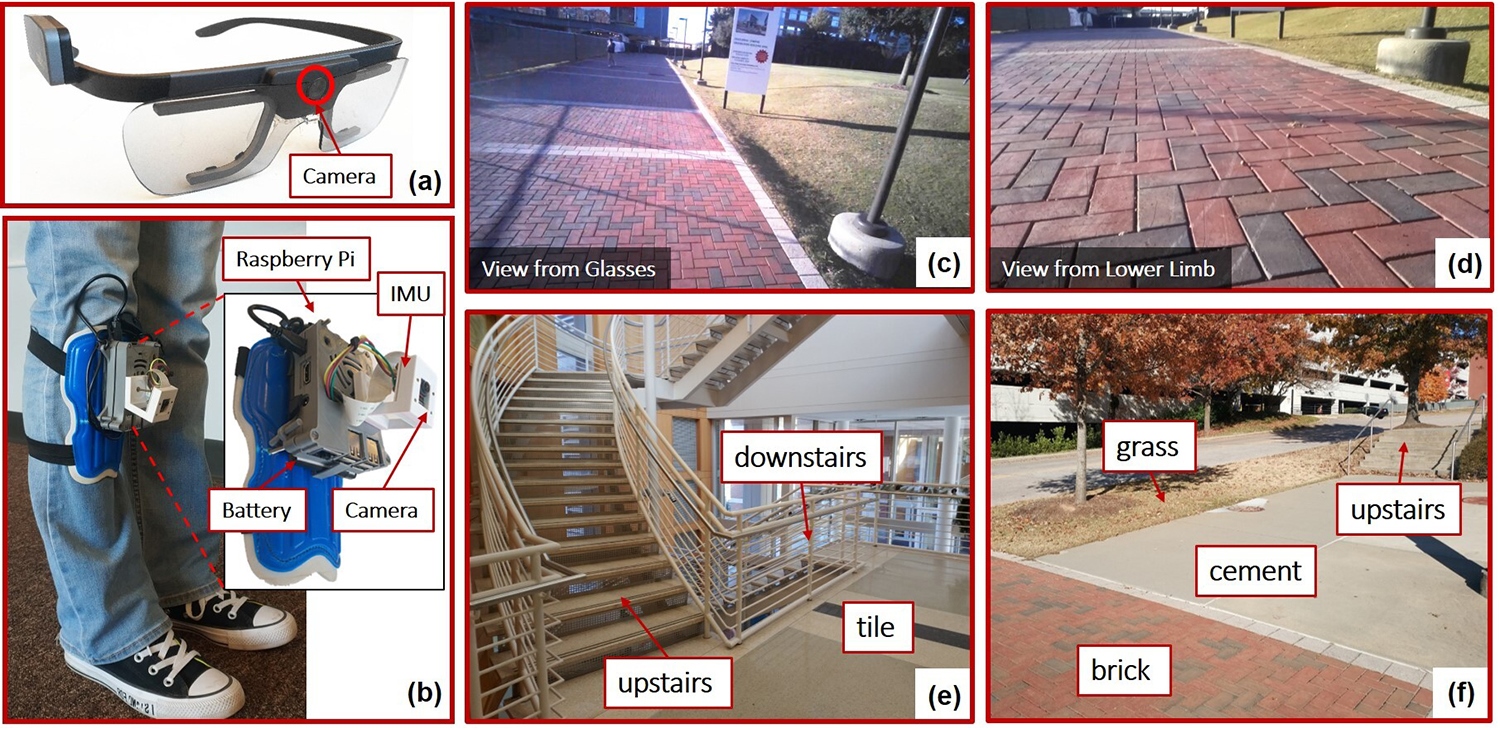
Технология заключается в установке небольшой камеры рядом с протезом, чтобы она могла видеть землю впереди. Видеосигнал поступает в компьютер, который способен распознавать различные виды грунта, включая траву, кирпич, бетон и даже плитку. Устройство также может распознать, есть ли впереди ступеньки лестницы и направлены ли они вверх или вниз.
Один из соавторов разработки Эдгар Лобатон говорит, что
Система, которую мы создали, позволяет искусственному интеллекту в роботизированных протезах предсказывать, по какому типу рельефа будут идти пользователи, количественно оценивать неопределенности, связанные с этим обстоятельством, а затем учитывать эту неопределенность в процессе принятия решений. Мы смогли научить систему глубокого обучения тому, как оценивать и количественно определять неопределенности таким образом, чтобы алгоритм мог включать эти неопределенности в процесс принятия решений.
Если степень неопределенности слишком высока, искусственный интеллект не будет принимать сомнительное решение - вместо этого он может уведомить пользователя о том, что у него недостаточно уверенности в своих предсказаниях, чтобы действовать, или может перейти в "безопасный" режим по умолчанию.

