Микро-роботы в нашем теле
Корейские специалисты из Национального университета Чоннам разработали технологию направленного переноса лекарственных препаратов с помощью микро-роботов, управляемых термо-электромагнитным способом.
Информация об этой разработке была опубликована в International Journal of Control, Automation and Systems.
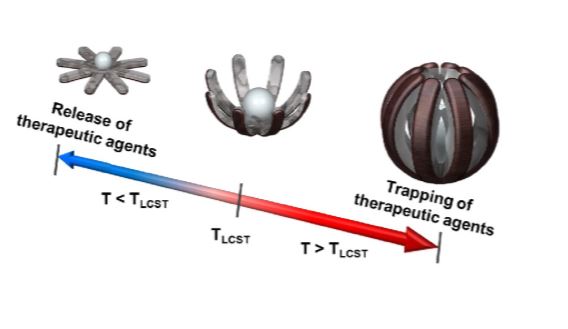
Этот микро-робот изготавливается методом 2D-литографии с использованием УФ-полимеризации и состоит из электромагнитно-активируемого слоя и термореактивного слоя. Микро-робот может самостоятельно менять свою форму (складываться или раскладываться) при изменении температуры и направляться в нужное место с помощью системы электромагнитного управления, которая обеспечивается внешним магнитным полем.
Т.е. с помощью внешнего магнитного поля эти миниатюрные устройства, которые способны нести на себе полезный груз в виде лекарственного препарата, могут направляться к определенному месту внутри человеческого организма, где они раскрываются, "сгружают" свое содержимое и с помощью того же магнитного поля перенаправляются в систему выделения. Причем эти движения микро-роботы могут осуществлять как в сложенном, так и разложенном после "разгрузки" состоянии.
В процессе тестирования этой разработки микро-роботы доставляли и высвобождали онкологический препарат (доцетаксел), заключенный в микробусины диаметром около 300 мкм с соответствующей концентрацией препарата против опухоли молочной железы.
Результаты этих исследований свидетельствуют о том, что управляемый термо-электромагнитным образом микро-робот пригоден для использования в биомедицине. В частности, новое средство позволяет использовать лекарственные препараты непосредственно в месте повреждения, что может найти применение при лечении широкого круга заболеваний.
В последние несколько лет разработки подобных "роботизированных" микро-устройств, которые предназначены для различных целей, ведут несколько академических организаций и коммерческих компаний.
В частности, американские ученые из университета Пердью разработали подобную имплантируемую систему доставки лекарств, которая использует дистанционно управляемые нанонити. Эти наноэлементы реагируют на электромагнитное поле, создаваемое устройством управления, которое используется для контроля доставки и высвобождения заранее загруженных лекарств. Трубки и провода, которые обычно используются с другими имплантируемыми устройствами, здесь не применяются, что сводит к минимуму риск инфицирования.
А американские исследователи из Массачусетского технологического института разработали самого маленького в мире робота размером с человеческую клетку, который способен воспринимать свое окружение. Это сверхминиатюрное устройство имеет не только сенсоры, но и встроенные компьютерные компоненты, включающие память и процессор, что позволяет ему действительно что-то делать с теми данными, которые он способен получить.
Исследователи построили своих полностью автономных микро-роботов, "привив" крошечные, предварительно упакованные электронные сборки на коллоидные частицы. Поскольку эти коллоидные частицы могут легко перемещаться за счет воздействия на них жидкой среды, они могут выполнять роль отличной платформы для "плавания" в кровотоке или в другой жидкой биологической среде, например, в пищеварительном тракте человека.
Сенсоры такого роботизированного устройства представляет собой химический детектор, построенный из, например, двумерных пластинок графена. Когда такой сенсор "встречается" в биологической среде с каким-то определенным химическим веществом, его проводимость изменяется и эти изменения фиксируются.
И еще одна разработка родом из США. Ученые Калифорнийского университета в Сан-Диего с помощью 3D-принтера создали сверхминиатюрное устройство, которое имеет двигательный механизм, систему навигации и даже возможности детоксикации среды, которые могут позволить ему плыть по кровяным сосудам и даже доставлять в нужное место лекарства. Устройство изготавливается с помощью микроскопической оптической печати, которая позволяет создавать сложные формы и несколько функциональных зон.
На задней части устройства есть полость с платиновыми наночастицами, которые взаимодействуют с перекисью водорода, создавая таким образом тяговую силу, перемещающую этот микро-робот вперед, а в передней части - пространство, заполненное наночастицами оксида железа, которые могут взаимодействовать с магнитом, направляющим устройство в определенное место.
Все упомянутые выше проекты пока находятся на стадии отработки концепции и пока не готовы к реальному использованию в клинических условиях, но, вероятно, этого времени осталось ждать недолго.

