Роботизированное устройство для людей с ограниченной подвижностью руки
Исследователи из Южной Кореи разработали износостойкое мягкое роботизированное устройство, которое помогает пациентам с нарушениями подвижности рук хватать и отпускать предметы. Исследователи разработали алгоритм машинного обучения для прогнозирования намерений пользователя, который помогает пациентам использовать устройство более интуитивно. Информация об этом проекте опубликована в журнале ScienceRobotics.
Получив сигнал от камеры, установленной на очках пользователя, алгоритм может спрогнозировать, что пытается сделать этот человек, и проинструктировать роботизированное устройство о том, как ему следует помочь. Например, если пользователь пытается что-то схватить, программное обеспечение может обнаружить это с помощью камеры, оценивая движение руки и расстояние до объекта.
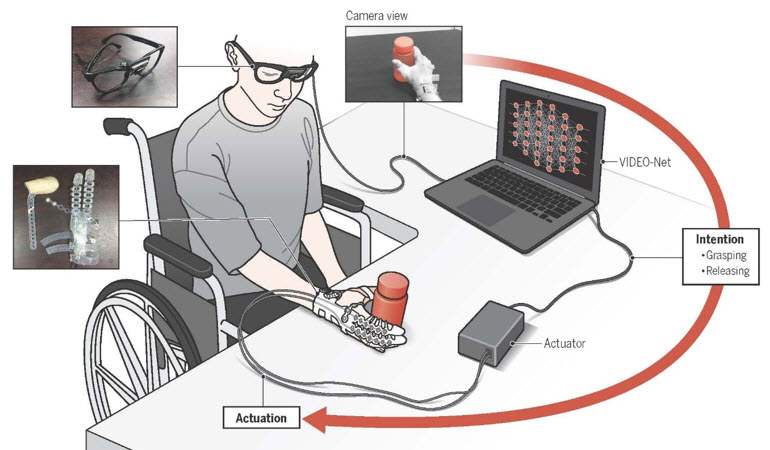
После того, как программа определит, что пользователь хочет взять в руку объект, она может активировать мягкие актуаторы (приводы), добавив таким образом дополнительную силу пальцам пользователя. Система включает в себя компьютер, на котором работает программа, и исполнительный модуль, управляющий актуаторами. Система пока существует только в формате прототипа, и исследователи хотели бы ее миниатюризировать, чтобы ее можно было легко носить.
Новая технология предназначена для пациентов с нарушениями подвижности рук, например, с травмами спинного мозга, инсультом или церебральным параличом. Потеря подвижности рук может затруднить или сделать невозможным выполнение повседневных задач для таких людей, а использование подобных вспомогательных технологий может значительно повысить качество их жизни.
Система не нуждается в калибровке и может адаптироваться к движениям любого пользователя.
В настоящее время эта технология имеет и свои ограничения. Например, если объект скрыт от камеры или находится вне зоны видимости, устройство не сможет помочь пользователю. Поэтому разработчики планируют усовершенствовать свой алгоритм, чтобы он учитывал и другую сенсорную информацию или данные, полученные с помощью иных методов обнаружения намерений пользователя, например, с помощью электромиографического датчика или программы слежения за взглядом.

